Computing the Optimal Path using Dynamic Time Warping
Dynamic Time Warping is a technique for optimally aligning two trajectories. This technique stretches or compresses one or both trajectories in accordance with user specified options such as local and global constraints, so that the trajectories are synchronized.
Prerequisites
Procedure
- On the Data tab, in the Transformations pane, click Dynamic Time Warping.
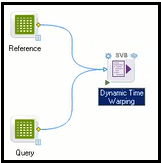
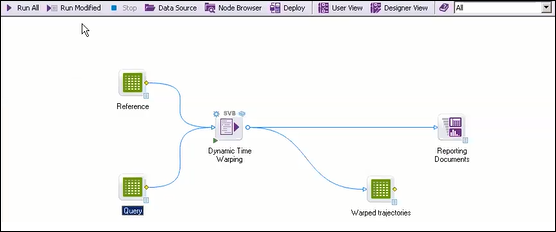
- To run the algorithm specify the reference and query trajectory.
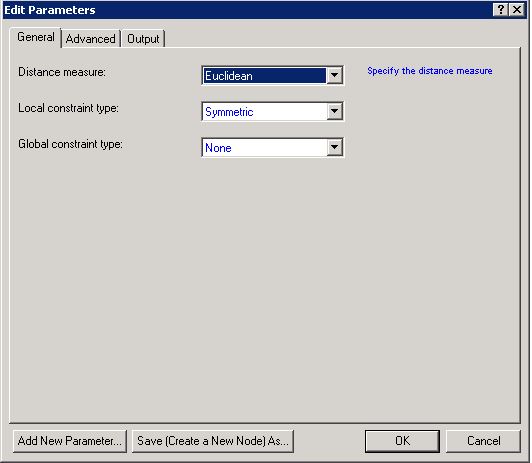
- To open the Edit Parameters dialog box, double-click the Dynamic Time Warping workspace node.
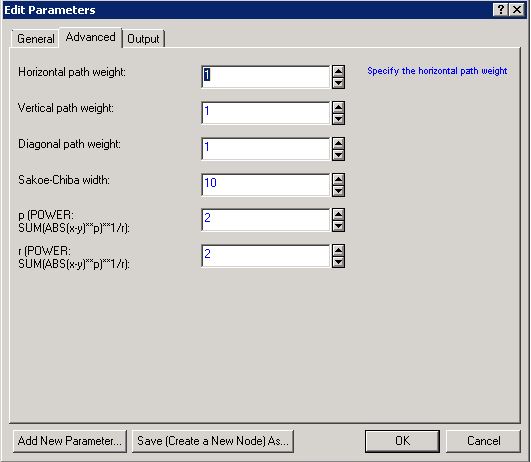
- On the Advanced tab, specify custom weights for horizontal, vertical, and diagonal moves through the cost matrix.
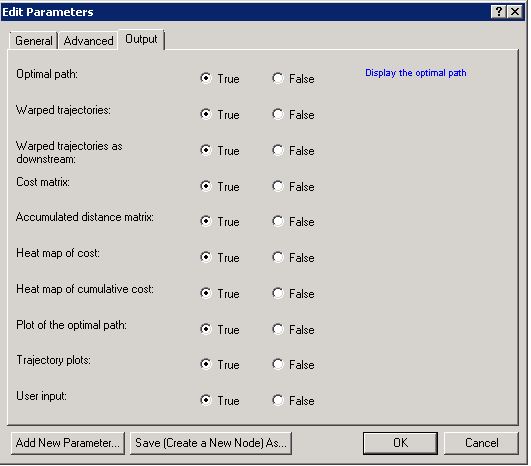
- On the Output tab, specify the output documents.
Copyright © Cloud Software Group, Inc. All rights reserved.